
Project
Tactile Display
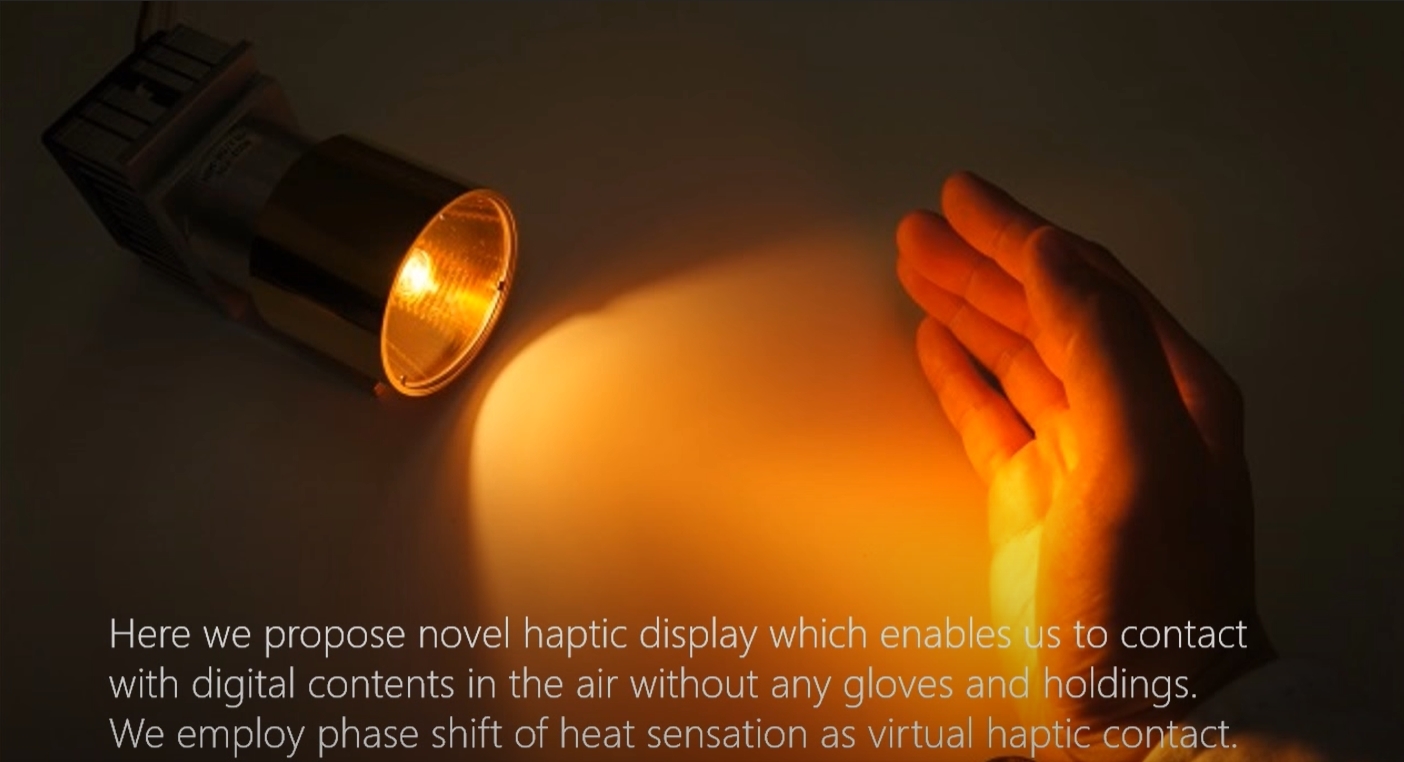
Here we propose novel haptic display which enables us to contact with digital contents in the air without any gloves and holdings.
Based on the 2.5 dimensional display technology, we realized further function.
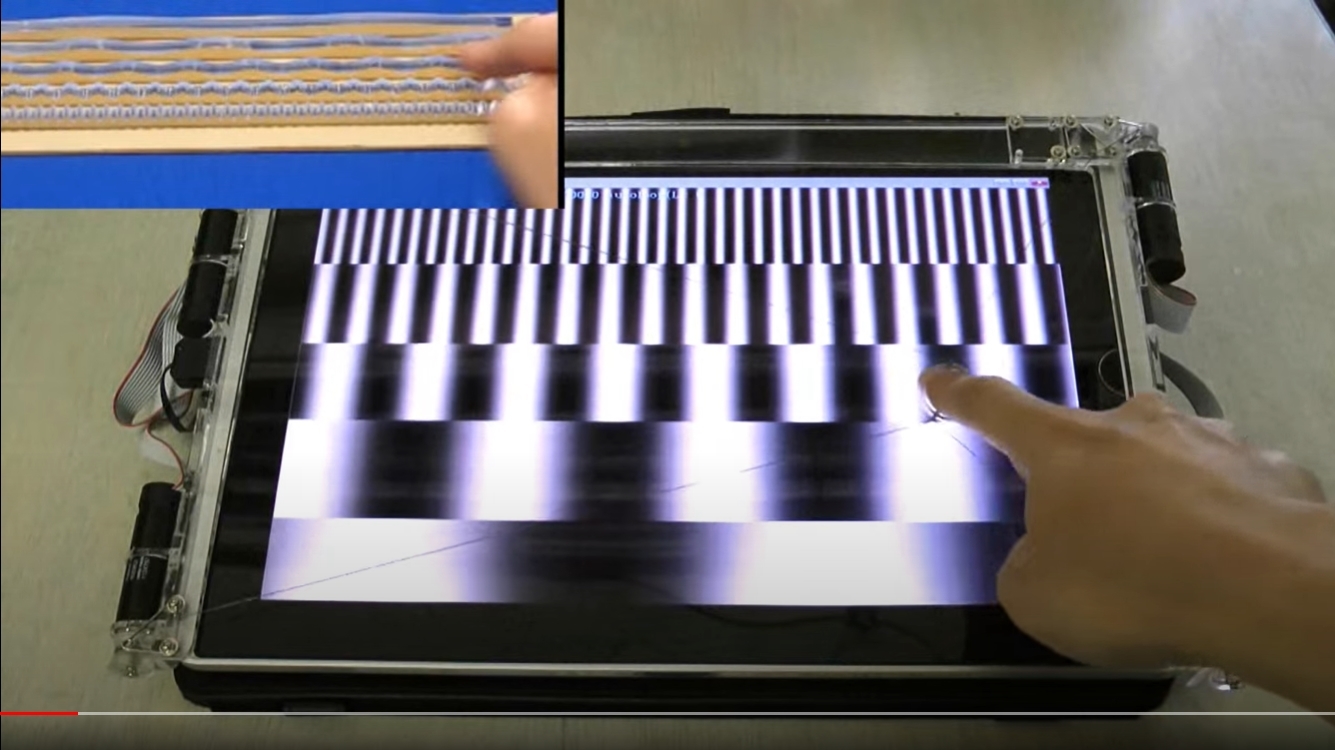
We developed an experimental prototype of lateral-force-based display, investigated 2.5-dimensional sensations, realized a part of these essential information, and confirmed the linearity between the presented force and the bump amplitude.
Tactile Sensor
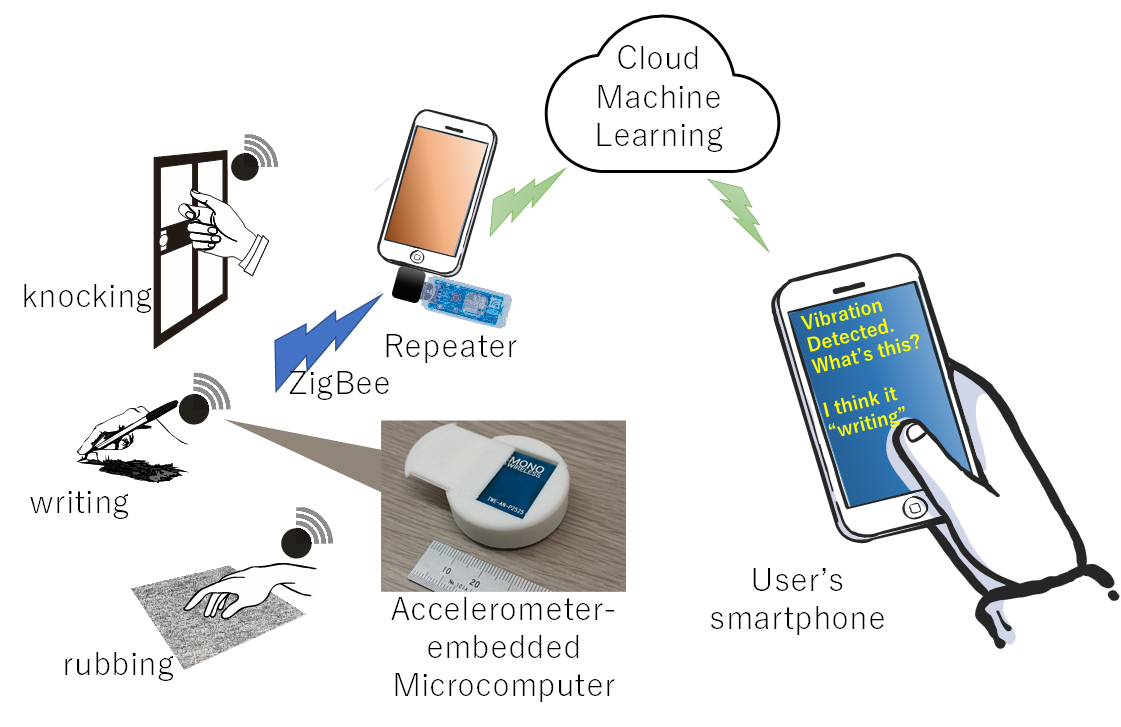
We propose a framework of “collecting/encoding system for inter-world haptic interaction.” The framework realizes haptic information transformation between real world and real human through virtual, computational world by employing a collection and encoding of vast haptic/physical interaction between real world/human.
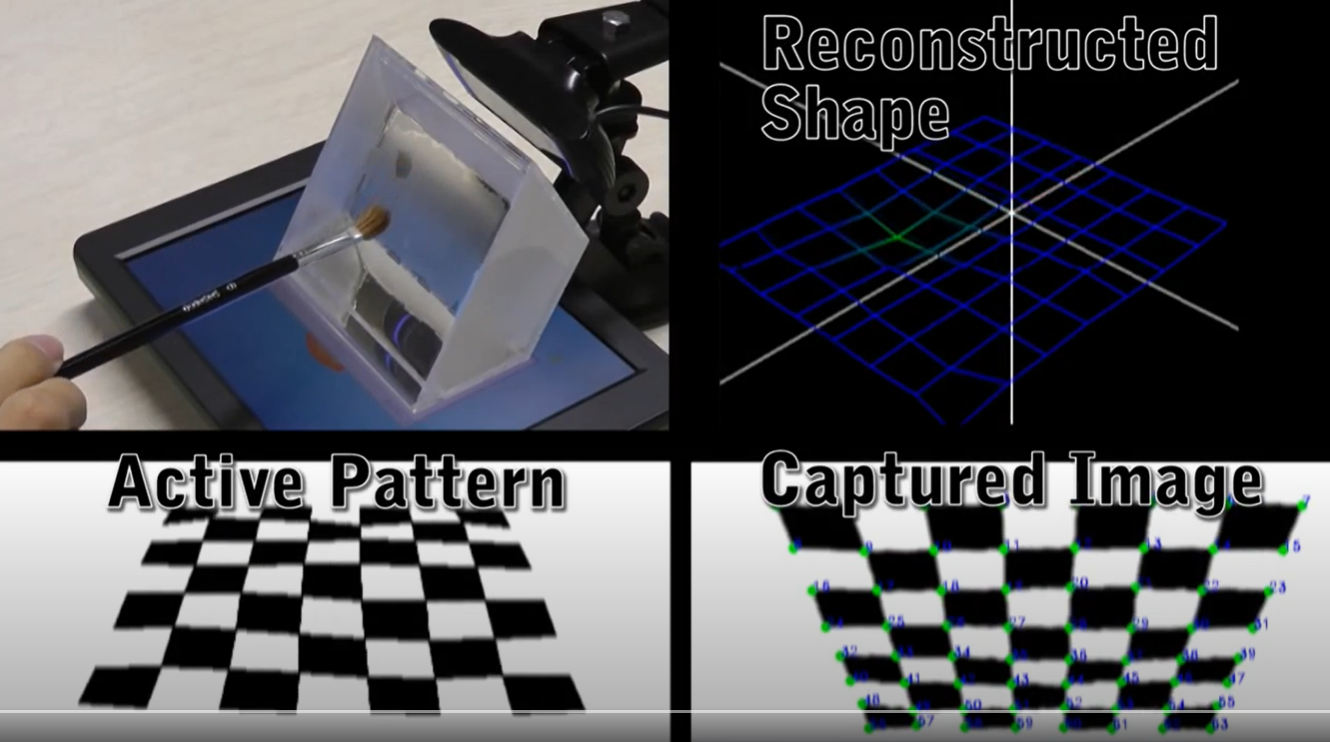
We enhanced the function of RefShape, and realize active sensing method.

We have developed a fibratus tactile sensor that utilizes the property of reflection.
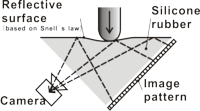
We construct a tactile sensor that utilize the resolution of a camera to the maximum by using transparent silicone rubber as a deformable mirror surface and taking advantage of the reflection image.
Haptic Display
Here we propose novel haptic display which enables us to contact with digital contents in the air without any gloves and holdings.

In this research we propose tactile display using dilatant fluid as having dynamic elasticity and deformable material.
Haptic Teaching
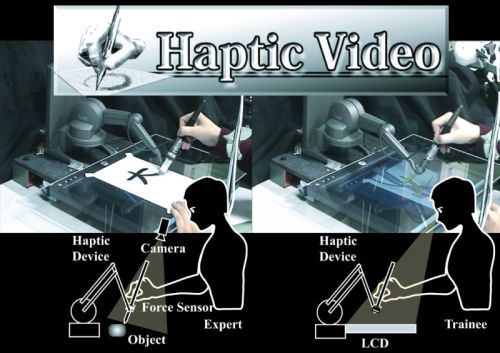
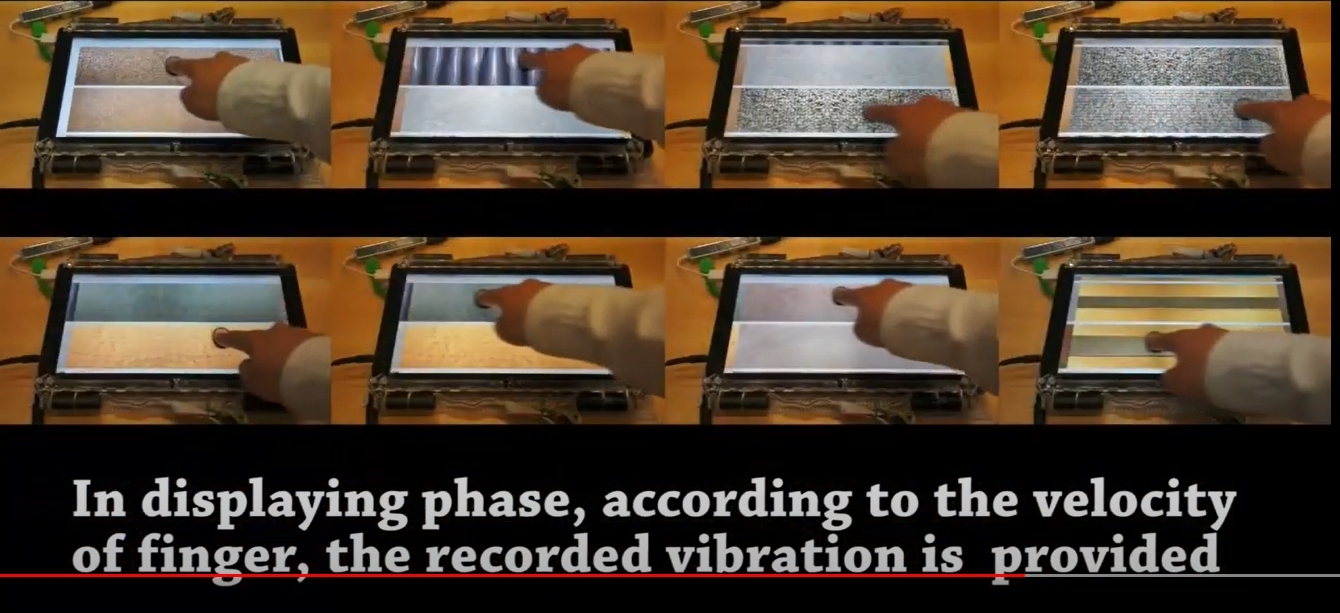
We propose “Haptic Video”, a system that records an expert’s operations and reproduces them dynamically through haptic devices.
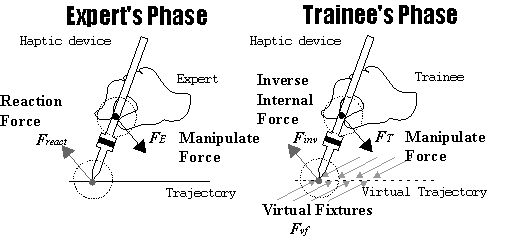
We propose a haptic teaching system that uses haptic devices to teach hand skills.
Visual Display

In this research, we propose an interactive display system that has a simple implementation.