RefShape
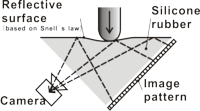
In recent years, with the advancement in robotics, many tactile sensors have been developed to improve force sensation in robots. Several tactile sensors are commercially available in the market. The disadvantage of these distribution-type force sensors is the number of wirings of sensor units. We realize a new type of tactile sensor which has high-spacial-resolution and simple structure. We construct a tactile sensor that utilize the resolution of a camera to the maximum by using transparent silicone rubber as a deformable mirror surface and taking advantage of the reflection image. Now we confirm the precision of reconstructed sensor shape by employing real-time optimization method with the simulated sequential images.