




About
Introduction
- Main theme of our laboratory is "Expansion of Human Function." We design human-centric interfaces. Research fields are virtual-reality, augmented-reality, human-interface and so on. Currently we work on haptic-based interface technologies.
Researches
- Tactile Display as a New Media
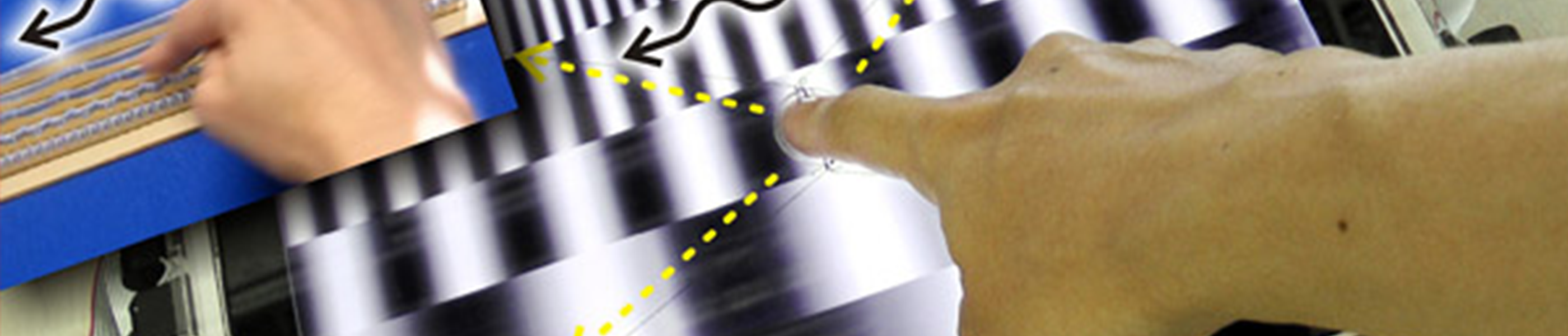
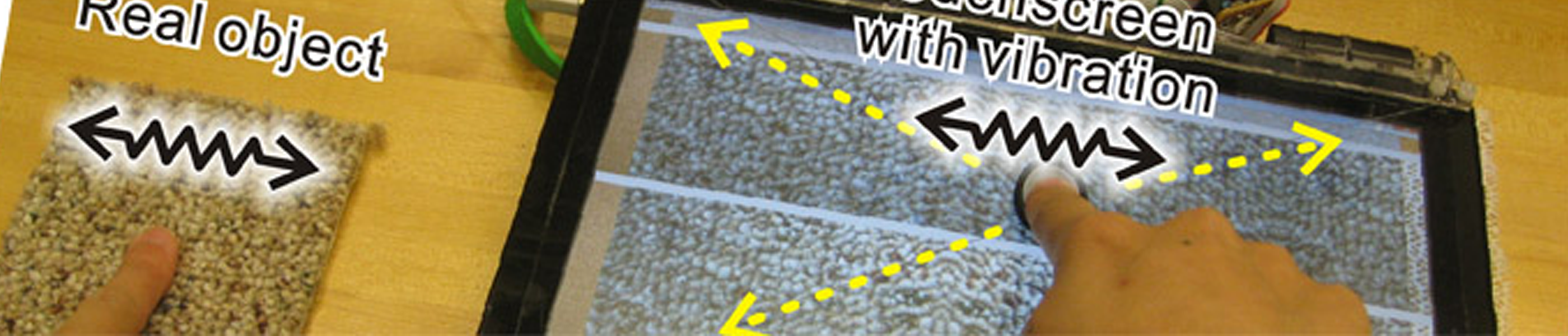
- Conventional tactile displays which show physical shapes are hard to display true reality. We employ illusional feelings of human or inherent phenomena of object and design novel device to display true reality. We propose tactile displays as novel media for transmitting sensibility information.
- Tactile Sensor which beyond Human Function
- To transmit various tactile information which human feels, we have to evaluate felt sensation presicely. Here we design sensing method which realize characteristics of human sensation. Furthermore by transcending the characteristics, we aim at robotics technology by which robots realize highly skilled manipulation, or by which robots coexist with human.
- Haptic Display for Teaching Skills
- Highly skilled techniques of human, such as traditional techniques, should be recorded and taken over to next generation. To realize record and playing system, we propose to employ haptic display. Not obeying the movement of haptic display, but employing proactivity of human, we propose a record and playing system which realize proactive experience of technique and leaning method of exerting forces.
News
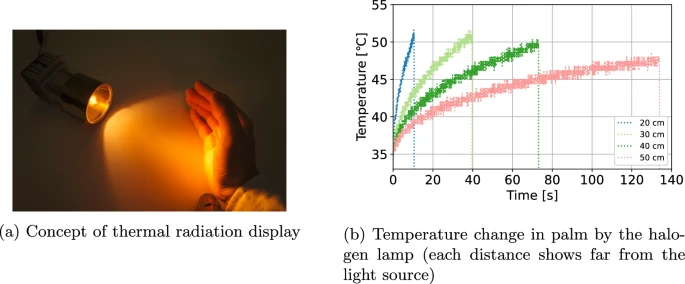
Our paper has been published in ROBOMECH Journal. This paper explores a novel method for displaying tactile information using thermal radiation. We present two systems: one using halogen lamps and the other using laser scanning. The laser-scanning system demonstrated significantly improved accuracy and speed in delivering thermal stimuli, enabling the creation of detailed and dynamic tactile experiences.
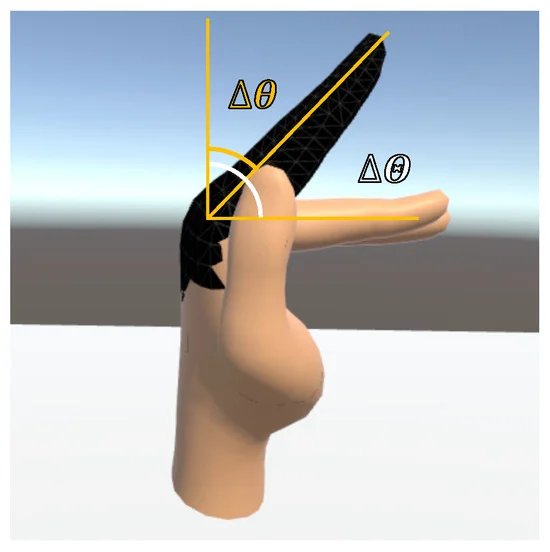
Our paper has been published on MDPI MTI. This research explores how manipulating visual feedback to create "pseudo-haptic" sensations changes when applied selectively to adjacent fingers.
Our paper has been published on MDPI Sensors.
Ishimaru, T.; Saga, S. Evaluation of Electric Muscle Stimulation Method for Haptic Augmented Reality. Sensors 2023, 23, 1796.
In this article, we investigated several characteristics of Electric Muscle Stimulation. Our findings are as follows;
Using stimulation waveforms with a frequency of 35 to 50 Hz and a pulse width of 0.4 to 0.6 ms could present force without causing significant pain or discomfort.
Users subjectively felt a physical force of 0.6 N compared to the EMS force of 0.3 N.
The linearity between the amount of current per time and the presentation force suggested it is possible to control the force.

The Thirteenth International Conference on Advances in Computer-Human Interactions ACHI 2020における発表にて
黒木 詢也 くんが,"Rendering Method of 2-Dimensional Vibration Presentation for Improving Fidelity of Haptic Texture" にて,
我妻 正太郎 くんが,"Simple Generative Adversarial Network to Generate Three-axis Time-series Data for Vibrotactile Displays" にて
International Academy, Research, and Industry Association Best Paper Awardを受賞しました!
4/9, 10は熊本大学の新4年生向け研究室公開ですが,COVID-19対応のため本研究室ではZoomを利用した公開とします.詳細は学科掲示板を確認してください.