RefShape
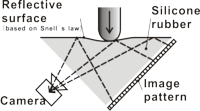
力を計測する触覚センサとして,1 点の力を測定する6 軸力センサや,接触状態を計測するセンサ,力の分布を計測する触覚センサなどが市販されています.しかしながら多くの場合,センサユニットの数とユニットに伴う配線数が問題点になります.本研究では透明なシリコンゴムを用い,「光てこ」の原理により角度変位を拡大して画像計測することにより,微細な変位を計測可能なセンサを構成します.本手法によりこれまでの触覚センサにない,空間的高解像度をもち,かつごく単純な構造をもつ触覚センサを実現します. 現在のところ,実時間での最適化計算により,形状を正確に復元できることをシミュレーション画像により確認しています.